John Deere'i kaubamärgi harvesterid on väga spetsialiseerunud metsaraietehnika.
Alates 1867. aastast laias valikus põllumajandusmasinaid tootva maailmakuulsa tootjana peab ettevõte oma tegevuse põhisuunaks kvaliteetsete, tootlike, intelligentsete masinate loomist, mis vastavad raietööstuse vajadustele.
Mis funktsioonid teevad
Harvesterid "John Deere" koguvad endas uusimaid tehnilisi saavutusi traditsioonilise kvaliteedi ja suurenenud sooviga kõigi käimasolevate protsesside automatiseerimise järele.
Ettevõtte tehnoloogid pööravad erilist tähelepanu uuenduste juurutamisele, mis võimaldab selle tootja seadmetel ajaga kaasas käia.
Kohaldatav langetamiseks, taaramiseks, laasimiseks, tüvede sortiment edasiseks transpordiks Nimetatud kaubamärgi harvesterid eristuvad suurenenud manööverdusvõime, maastikusõiduvõime, kõrge efektiivsuse ja minimeeritud kütusekuludega.
Neid masinaid kasutatakse nii metsatükkides kui ka teedeehituses, realiseerides end suurepäraselt pehmel pinnasel, soisel pinnasel ja ühtlasel asfaltpinnal.
Tootja toodab harvestereid, mis on ette nähtud järgmiste toimingute tegemiseks:
- harvendus- ja saagikoristus väikesed oksad;
- lageraie peenikesetüvelised ja suuremad puud;
- metsaraieäärmine keerukus.
Kõige nõutum on tehnika, mis keskendub kahes viimases lõigus näidatud protsesside rakendamisele.
Tehnilised andmed, kasutades näitena 1270 seeriat
1996. aastal John Deer kaubamärgi poolt turule tulnud 1270 harvesteriseeria lageraieks saavutas kohe ülemaailmse tuntuse.
Selle sarja mudelites sisalduvad tehnilised lahendused olid nii edukad, et masinad artikliga 1270 on endiselt olemas, neid pidevalt uuendatakse ja täiustatakse.
Kõik seeria modifikatsioonid olid selle kategooria tehnoloogia arengus tõeline revolutsiooniline läbimurre.
 Seeria 1270 harvesterid on jagatud D ja E versiooni masinate rühmadesse. Selle liini metsaüksustel on kõigile versioonidele ühised omadused ja need koosnevad järgmistest parameetritest:
Seeria 1270 harvesterid on jagatud D ja E versiooni masinate rühmadesse. Selle liini metsaüksustel on kõigile versioonidele ühised omadused ja need koosnevad järgmistest parameetritest:
- kuue teljevahe;
- võimas 6-silindriline mootor;
- pöörlev kabiin;
- intelligentne navigatsioonisüsteem saagimisprotsessi juhtimiseks ning peamiste mehhanismide ja sõlmede toimimise diagnoosimiseks.
Üldiselt on John Deere'i harvesterite tehnilistes omadustes vaid väikesed erinevused ja seda saate kontrollida, tehes selle tootja mõne mudeli võrdleva analüüsi.
Samuti aitab selline kaalutlus üksikasjalikumalt süveneda kirjeldatud kaubamärgi konstruktiivse täiuslikkuse algpõhjustesse.
Versioon "E"
2008. aastal masstootmisse käivitatud 1270 E kombainid on masinad, mis oma tootlikkuse, manööverdusvõime ja töökindluse poolest märkimisväärselt paremad kui varasemad D-seeria kolleegid.
Nüüd muutus suurte tüvede langetamine ja vana puidu harvendusraie veelgi tõhusamaks.
Peamistes struktuuriüksustes ja elementides kattudes eelmiste seadmetega, on seadme uuel versioonil mitmeid täiustatud spetsifikatsioone, mida saab esitada järgmise loendina:
- mootori võimsuse suurenemine IV astme standard kuni 170 kW;
- pöördemomendi suurendamine, saavutab juba 1125 Nm 1200-1400 p/min juures;
- paranenud veojõud kuni parameetriteni 175 kNm;
- uue CH7 manipulaatori paigaldamine, mille pöördemoment on 15% ja tõstejõud 11%, noole pöördenurk on 220° ja maksimaalne ulatus 8,6, 10 ja 11,7 m;
- kanderaamide tugevdamine ning selle tulemusena kabiini liikuvuse suurenemine ja kogu masina manööverdusvõime paranemine tervikuna.
 Kõigi uuendatud seeria harvesteritega kaasas olev TimberMatic H-09 mõõte- ja juhtimissüsteem muudab juhtimise veelgi mugavamaks ja lihtsamaks.
Kõigi uuendatud seeria harvesteritega kaasas olev TimberMatic H-09 mõõte- ja juhtimissüsteem muudab juhtimise veelgi mugavamaks ja lihtsamaks.
Dialoogiakende kiire avamise võimalused on optimeeritud ja ilmunud on töörõhu indikaatoritel põhinev juhtimisfunktsioon. Programm TimberLink™ eristab kirjeldatud harvestereid jätkuvalt paljudest sarnastest seadmetest.
Kunagi varem pole olnud nii lihtne kõiki seadmetes toimuvaid tööprotsesse kontrollida ning defekte avastada ja kõrvaldada. Lisaks mainitud võimalustele koolitab TimberLink™ kvalifitseeritud operaatoreid seda seadet kasutama.
1270D ja 1470D
See tehnika on mõeldud lageraieks ja hooldusraieks (1270 D) ning kõrgendatud keerukusega puude langetamiseks (1470 D).
Erinevused
Mõlema mudeli jõuallikaks on 6-silindriline John Deere 6090 PowerTech Plus turbomootor koos heitgaaside järeltöötlusega.
Esimese masina väljundvõimsus on 160 kW, teise 180 kW.
Elektrijaam vastab TIER III standarditele, mis reguleerivad heitgaaside toksilisuse madalat taset.
Masinate mootorid on tingimata varustatud spetsiaalse automatiseeritud mootori pöörlemissageduse juhtimissüsteemiga. See tähendab, et kui harvesteripea on pikka aega tühikäigul, langetab jõuallikas pöörete arvu ja töötsükli alguses suurendab nende arvu uuesti.
Nii saab mitte ainult oluliselt säästa kütust ja vähendada mürataset, vaid ka oluliselt vähendada kasutuskulusid.
Neid parameetreid kontrollib süsteem Timbermatic™ 300, mis integreerib FlashCut™-i, ülitäpse saagimise eest vastutava mehhanismi, mis on ainulaadne paljude selliste seadmete hulgas.

Lisaks aitab Windowsi põhises arvutis töötav Timbermatic™ 300 teie puude lõikamise toiminguid sujuvamaks muuta, kogudes teavet kõigi puuparameetrite kohta ja soovitades parimaid kalibreerimisvõimalusi.
Olemasolev juhtmevaba side baasi ja teiste masinatega võimaldab reguleerida töövoogu, muutes transpordimarsruutide väljatöötamise ja uutele kruntidele kolimise lihtsamaks.
TimberLink™ on automaatsele tarkvarale paigaldatud lisavõimalus, mis hõlbustab keerukate seadmete töö hindamistegevuste läbiviimist.
Nüüd on ennetavad uuringud ja tõrkeotsing muutunud veelgi usaldusväärsemaks ja tõhusamaks.
Kergema harvesteri 1100 Nm pöördemoment 1400 p/min juures jääb alla üliraske harvesteri omale, mille pöördemoment on 1250 Nm pööretel 1400 p/min.
See kõrge hinnang tagab suurepärase jõudluse isegi kõige raskemates ja ebasoodsates tingimustes, nagu nõlvad, ebatasased maastikud.
Käigukast, mis on kõne all olevate mudelitega varustatud, on mõlemal masinal sama ja on kahekäiguline hüdrostaatilis-mehaaniline agregaat.
1270 D maksimaalne kiirus on 25 km/h, 1470 D puhul 22 km/h. Esimese harvesteri tõmbejõud on 160 Nm, teise 180 Nm, mis tagab selle varustuse suurepärase funktsionaalsuse.
Masinate konstruktsioon tagab raami pöördenurga proportsionaalse juhtimise, mis on 42 °. Juhtimine toimub minihoova abil.
Kirjeldatud masinate abi- ja sõidupidureid iseloomustatakse õlivannis mitmekettalistena, hüdraulilise ajamiga. Parkimis- ja hädaseiskamissüsteemid on vedruga.
 Töökindel hüdromanipulaator, mis asub masina raami esiosas, on saadaval erinevates versioonides. Näiteks 1270 D saab varustada neljakraadise noolega, mille kaldenurk on 13° nii ette kui taha.
Töökindel hüdromanipulaator, mis asub masina raami esiosas, on saadaval erinevates versioonides. Näiteks 1270 D saab varustada neljakraadise noolega, mille kaldenurk on 13° nii ette kui taha.
Juhtimist saab teha käsitsi ja automaatselt. Harvesterile 1470 D paigaldatud kraana CH 8 on saadaval kolmes tehnoloogilises versioonis, millel on võimalus kallutada ettepoole 25° ja tagasi 15°.
Sarnasused
Mugavat ergonoomilist salongi tuleks pidada kirjeldatud seadmete arendajate eriliseks uhkuseks. Suurepärane nähtavus, mida pakuvad löögikindlast klaasist panoraamaknad, tagab operaatorile suurepärase nähtavuse töökohale.
Konditsioneeri-, kütte- ja ventilatsioonisüsteemi olemasolu tagab salongis tervisliku mikrokliima, tagades suurepärased tingimused ka pika tööseansi ajal.
Kõva iste ning mugavalt paigutatud nupud ja lülitid muudavad selle võimsa masina kasutamise väga lihtsaks. Pealegi, kabiini saab pöörata 50° mõlemale küljele ja kallutada igas suunas.
Enamikku funktsioone saab reguleerida käsitsi või Timbermatic™ 300 süsteemitarkvara kaudu.
2154 D
Roomikmasin 2154 D, mis ühendab endas ekskavaatori, harvesteri ja laaduri võimalused, on järjekordne ainulaadne John Deere'i kaubamärgi arendus.
Varustades selle erivarustuse tugevdatud terasest ristikujulise raami, suurendatud laagriga pööratava kabiini, prahi eemaldamise mehhanismidega, on tootja saavutanud rekordilised jõudlusnäitajad.
Seda soodustab võimalus paigaldada lisavarustust nagu võsarehad, tee-ehitajad ja hüdrauliline haarats. Seetõttu on selle seadme kasutamine nii metsaraietöödel kui ka teedeehitusel ja laadimistööde teostamisel vägagi õigustatud.
 Sellele logirajale paigaldatud mootori netovõimsus on 119 kW. Jõuallika omadused tagavad kõrge jõudluse, kütusesäästu ja vastavuse kõige rangematele keskkonnastandarditele.
Sellele logirajale paigaldatud mootori netovõimsus on 119 kW. Jõuallika omadused tagavad kõrge jõudluse, kütusesäästu ja vastavuse kõige rangematele keskkonnastandarditele.
Tugevdatud poomid ja pulgad, mis on valmistatud spetsiaalselt järgnevaks täiustatud tööks, on valmistatud sõlmede automatiseeritud täiustatud keevitamise meetodil. Poom oli varustatud lisakaitsetega võimalike tünnilöökide vastu.
Mudelit 2154 D on lihtne hooldada ja hooldada, kuna kõik konstruktsioonielemendid, mille kulumaterjale tuleb sageli vahetada, on paigutatud kergesti ligipääsetavatesse kohtadesse.
Selle varustuse kabiin on ergonoomika ja mugavuse tipp. Tõus töökohale toimub spetsiaalsel libisemisvastase kattega redelil.
Kabiini siseviimistlus ning jahutus-, kütte-, ventilatsioonisüsteemide olemasolu selles muudavad operaatori töö mugavaks ja pingevabaks. Sellesse loendisse tasub lisada sellised omadused nagu siin esineva müra ja vibratsiooni taseme minimeerimine masina töötamise ajal.
Millest hind sõltub?
Kõnealuse ettevõtte 1270E seeria uute mudelite maksumus algab 22 650 000 rublast, samas kui sama masin, mille arsenali on kogunenud tunde, maksab 12 000 000 rubla.
Kasutatud kombainide 1270 D ja 1470 D (2006-2007) eest küsivad nad alates 8 250 000 rubla, kuid seda tüüpi uued seadmed maksavad alates 17 000 000 rubla. Turul olevate seadmete hinnavahemik on väga lai.
Taotletavad summad ei sõltu ainult masinate tehnilisest seisukorrast ja nende tööajast, tootmisaastast, vaid ka müüva ettevõtte hinnapoliitikast.
Järgmisest videost saate teada, millised omadused on teisel John Deere'i harvesteri modifikatsioonil - 1470 E:
Autod: harvester/forvarder- teostada metsaraiet. Maailmas on üsna palju erinevaid metsaraie viise. Raieviise saab jagada paljude klassifitseerimiskriteeriumide järgi, kuid tavaliselt lähtutakse jaotamisel sellest, millisel kujul puit teeäärsesse lattu veetakse. Selle põhjal saab koristamismeetodid jagada neljaks peamiseks:
- pikkusesse lõigatud;
- piitsaplaks;
- terved puud;
- puiduhake.
Seoses tselluloosi- ja paberitööstuse toorainete karmistunud kvaliteedinõuetega kasutatakse otse raieplatsil puiduhaket peaaegu eranditult energiapuidu ülestöötamiseks.
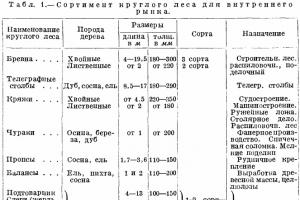
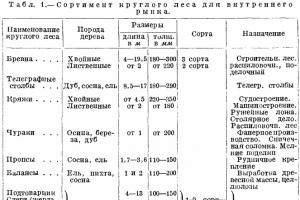
Tabelis 1 on toodud lihtsustatud diagramm selle kohta, millises saagikoristuse etapis tehakse üksikuid toiminguid erinevatel koristusmeetoditel. Tabelis on toodud ainult meetodite põhimõte. Täispika ja täispuidu koristamisega on praktikas tohutult palju võimalusi.
Kell lõigatud meetod puu langetatakse, oksad lõigatakse ja juba krundil lõigatakse need valmis sortimentideks, mis veetakse tee äärde eraldi hunnikutesse. Raiete, laasimise ja lahtilõikamine toimub kas käsitsi langetaja poolt mootorsaega või harvesteriga. Libisemist teostab kaubatraktor (forvarder) või skidder. Sageli mõõdetakse puitu ülestöötamise ajal. Teeäärsest laost veetakse puitu sortimentide kaupa töötlemiseks (lahustamiseks, saagimiseks või koorimiseks).
| Stseen | Sortimentid | piitsad | terved puud |
| Süžee | Valka Pügamine Mõõtmine Lõikamine sortimentideks |
Valka Pügamine |
Valka |
| Trelevka | Sortimentid | Tüved ilma oksteta | terved puud |
| teeäärne ladu | Laomajandus | Mõõtmine Laadimine |
Okste lõikamine. Mõõtmine Laadimine Osadeks või sortimentideks lõikamine |
| eemaldus | Sortimentid | Piitsad, piitsaosad või sortimendid | Terved puud, varred, varreosad või sortid |
| Tehas/terminal | Vastuvõtmine | Lõikamine sortimentideks Vastuvõtmine |
Lõikamine sortimentideks Vastuvõtmine |
Tabel 1. Saagikoristusmeetodid tööetappide kaupa
Kell piitsaplaks Selle meetodiga puu langetatakse, oksad lõigatakse krundil maha ja tüvi veetakse teeäärsesse lattu, kus see sageli sortimentideks ristatud. Saetud osa tarnitakse tehasesse lõikamata kujul. Laadimine sõidukitesse toimub tavaliselt eraldi laaduriga.
Tervete puudega raie meetod erineb piitsameetodist selle poolest, et laasimine toimub teeäärses laos, mõnikord isegi töötlemisettevõttes. Sageli on pikkusele ja täispuidu ülestöötamisele iseloomulikud eraldi klemmid. Suure täismetsaga piirkondades (näiteks Põhja-Ameerika, Venemaa, Hiina) peetakse mõnikord otstarbekaks koondada kogu ülestöötatud puidu täielik või osaline raie ja mõnikord isegi laasimine ühte terminali, kust tüvede või sortimendi osad. eksporditakse tsentraalselt erinevatesse töötlemisettevõtetesse.
Ülalkirjeldatud jaotus põhineb tüvede lõikamise olemusel ja eeldusel, et libisemist teostatakse mitmel viisil. Siiski viise metsaraie saab jagada veo enda laadi alusel. Siis saab eristada järgmisi meetodeid:
- käsitsi vedamine ja kandmine;
- veoloomade vedamine;
- buldooser;
- skidder;
- kaubaveotraktor (ekspediitor);
- vints;
- tramm;
- õhusild (helikopter, õhupall).
Peaaegu kõik esmase transpordi meetodid on seotud ülalkirjeldatud ristlõike põhimõtetega. Seetõttu on logimiseks sadu erinevaid võimalusi.
Piitsameetod on mugav suurte tüvede koristamiseks, kuna libisemine sõltub suuresti tüvede suurusest. Puupikkuse meetodi tugevuste hulka kuulub asjaolu, et nõutavad mehhanismid on valmistatavuse poolest lihtsad ja suudavad töötada järsematel nõlvadel kui lõikustehnika. Puupikkuse saagi nõrkuseks on aga see, et see ei sobi hästi harvendusraieteks ning vajab rohkem tehnikat ja suuri ladusid. Lõikemeetodit peetakse mõnevõrra keskkonnasõbralikumaks kui puu pikkuse meetodit. Puit on libisemisel vähem kahjustatud ja saastunud. Pikkuslõikamismasinad on tehniliselt keerukamad ja kallimad kui puupikkused masinad.
Mitmel korral on püütud võrrelda puidu ülestöötamise puu pikkuse ja raiutud meetodite majanduslikku efektiivsust. Selgeid erinevusi ei leitud. Erinevused on marginaalsed ja on seotud üksikute proovitükkidega. Mehhaniseeritud puupikkuses koristamine on väga tõhus suurtel, lühikeste veokaugustega maatükkidel. Kui libisemiskaugus suureneb, väheneb meetodi efektiivsus kiiresti.
Ühe või teise meetodi valikut ei seleta sugugi alati selle tõhusus või ökonoomsus. Iga riigi struktuursed ja sotsiaalsed tegurid mõjutavad suuresti koristusmeetodite valikut. Nendest teguritest on kõige olulisemad:
- traditsioonid / kultuur;
- infrastruktuuri/tehnoloogia tase;
- tööjõu kättesaadavus ja kvalifikatsioon;
- tööobjektide asukoht;
- tööaja struktuur;
- hankekulude tase, puiduhinnad ja nende suhe;
- ringlussevõtu alternatiivid.
Saagikoristusviise saab liigitada ka tööde mehhaniseerituse taseme alusel. Täielikult mehhaniseeritud toorikuga on kõik toimingud mehhaniseeritud. Kuid maailma mastaabis raiutakse valdav osa puidust käsitsitööd. Peaaegu kõikjal, kus tööstuslikku puitu toodetakse, tehakse raiet mootorsaagidega ning puidu kokkuveoks kasutatakse lugematuid võimalusi. Libisemine on arenenud riikides peamiselt mehhaniseeritud, samas kui mahajäänud riikides on endiselt aktuaalsed veoloomad (kaamelid, hobused, elevandid, muulad, eeslid jne).
Mehhaniseeritud saagikoristuse ajalugu on väga kõnekas. Mehhaniseerimine alustas oma arengut eraldi toimingutega (langetamine, virnastamine, ristlõikamine, laasimine jne) ning on juba liikunud kaheoperatsiooniliste masinate (langetaja-punker, langetaja-skilder) ja mitmeoperatsiooniliste masinate tasemele. Mitmeotstarbelised masinad on peamiselt Protsessor Ja harvester. Protsessor tähendab masinat või seadet, mis ei kuku, vaid harib ja lõikab tüvesid risti. Harvester (harvester) langetab puid, lõikab maha oksi ja ristub tüvesid. Mõnel juhul saab kogu töödeldava detaili töödelda ühe masinaga. See kombineeritud masin ehk metsaharvester (harwarder) on võimeline mitte ainult üles võtma, vaid ka raiutud puitu välja viima.
Lääneriikides on koristustehnoloogia läbimas teatud stabiliseerumise perioodi, kuid maailma mastaabis on koristusmeetodite komplekt endiselt väga mitmekesine. Allpool on toodud tüüpilised ja laialdaselt kasutatavad raietettide variandid.
1) Skandinaavia mehhaniseeritud metsaraie
Puidu ülestöötamisel kasutatakse kaasaegset tehnoloogiat: see on kas harvester/forvarder. Seda linki saab kasutada nii põhikasutuse raietel kui ka valikraietel.
1. pilt. Mehhaniseeritud lõikuskoristusühendus koosneb kahest masinast: harvester / forvarder
2) Käsitsi raiel põhinev lõikusmeetod
Puud langetavad ja lõikavad langetajad vajalikesse sortimentidesse otse krundil mootorsaagide abil, libisemist teostab forvarder või skidder. Käsitsi koristamine on endiselt laialt levinud kogu maailmas, ainult vedamise vahemaad on väga erinevad. Vähem arenenud piirkondades võib kasutada veoloomi (nt hobuseid).
3) Saagikoristusmeetod kaablilibisemisega (köisraudtee süsteem)
Puud langetatakse käsitsi ja piitsade või nende osadega  toimetatakse teele kallakule ehitatud köisraudteega. See on praktiliselt ainus koristusviis, mis sobib rohkem kui 30% kaldega maastikule. Köisradasid kasutatakse laialdaselt Norra, Šveitsi, Saksamaa, Jaapani mägipiirkondades ja USA läänerannikul. Nii on vastavalt konkreetsetele tingimustele võimalik liigutada tükeldatud tüvesid nii lõigatud kui ka lõikamata okstega.
toimetatakse teele kallakule ehitatud köisraudteega. See on praktiliselt ainus koristusviis, mis sobib rohkem kui 30% kaldega maastikule. Köisradasid kasutatakse laialdaselt Norra, Šveitsi, Saksamaa, Jaapani mägipiirkondades ja USA läänerannikul. Nii on vastavalt konkreetsetele tingimustele võimalik liigutada tükeldatud tüvesid nii lõigatud kui ka lõikamata okstega.
Joonis 2. Köiteed on laialdaselt kasutusel suurte nõlvadega lõikealadel. Kõige töökindlamaks osutus kaugjuhitav jooksev skyline süsteem.
4) Rattapundur, skidder ja eraldi laasimis- ja ristlõikamismasin
Puud langetatakse ja kimputakse soovitud suurusega kimpudeks langetaja (langetaja-buncher) abil. Felleripundurid jagunevad kahte põhitüüpi. Drive-to-tree masinatel paigaldatakse langetuspea ette otse masina raamile. Swing-to-tree masinatel on roomikalus ja manipulaator koos võimsa langetuspunniga.  Libisemist teostavad tavaliselt ratasjuudrid - haaratsid, mõnikord ka clambunk skidderid, millel on selle laadimiseks eraldi manipulaator. Tee ääres lõigatakse jäsemeid eraldi laasijaga, mõnel juhul ka raiutakse eraldi taaraga (slasher). Praegu kasutatakse üha enam neid funktsioone ühendavat delimber-slasherit, protsessorit. Piitsa- või täispuidust meetod on eriti efektiivne suurtel, lühikeste libisemiskaugustega kruntidel. Pikkade libisemisdistantside jaoks on koonilise kinnitusseadmega skidder tänu oma suuremale kandevõimele palju tõhusam kui haaratsiga skidder.
Libisemist teostavad tavaliselt ratasjuudrid - haaratsid, mõnikord ka clambunk skidderid, millel on selle laadimiseks eraldi manipulaator. Tee ääres lõigatakse jäsemeid eraldi laasijaga, mõnel juhul ka raiutakse eraldi taaraga (slasher). Praegu kasutatakse üha enam neid funktsioone ühendavat delimber-slasherit, protsessorit. Piitsa- või täispuidust meetod on eriti efektiivne suurtel, lühikeste libisemiskaugustega kruntidel. Pikkade libisemisdistantside jaoks on koonilise kinnitusseadmega skidder tänu oma suuremale kandevõimele palju tõhusam kui haaratsiga skidder.
Joonis 3 Täispuidust meetodi ülestöötlemisketti kuuluvad langetuspuur (feller-buncher) ja haaratsiga skidder (haarats skidder). Rattapundur peaks püüdma teha sellise suurusega pakke, et skidder saaks need ühe hooga välja võtta.
5) Raie- või harvesteripeaga ekskavaator (ekskavaator-harvester)
Roomikekskavaatorile või sarnasele masinale paigaldatakse harvesteripea.  Masin töötab suure kaldega kohtades tee ääres protsessorina või krundil täisväärtusliku harvesterina. Vedaja roomiksõiduk on töökindel ja kulutõhus, kuid pinnasekahjustuse tase on suurem kui ratassõidukitel. Harvendamiseks see ei sobi. Selline masin on aga laialt levinud paljudes maailma piirkondades. Selle meetodi eelis on seotud kanduri mitmeotstarbelise kasutamise kuluefektiivsusega. Näiteks saab ekskavaatoriga teha talvel metsaraiet, soojal ajal aga kaeve- või metsatöödel. Tänapäeval paigaldatakse metsatehnika ka roomikšassiile, et luua langetuspuur. Sellise masina hea maastikuvõimekuse tagab suur kliirens ja mugavuse tagab pöörlev kabiin.
Masin töötab suure kaldega kohtades tee ääres protsessorina või krundil täisväärtusliku harvesterina. Vedaja roomiksõiduk on töökindel ja kulutõhus, kuid pinnasekahjustuse tase on suurem kui ratassõidukitel. Harvendamiseks see ei sobi. Selline masin on aga laialt levinud paljudes maailma piirkondades. Selle meetodi eelis on seotud kanduri mitmeotstarbelise kasutamise kuluefektiivsusega. Näiteks saab ekskavaatoriga teha talvel metsaraiet, soojal ajal aga kaeve- või metsatöödel. Tänapäeval paigaldatakse metsatehnika ka roomikšassiile, et luua langetuspuur. Sellise masina hea maastikuvõimekuse tagab suur kliirens ja mugavuse tagab pöörlev kabiin.
Joonis 4 Kombineeritud ekskavaator-harvester on viimastel aastatel kogunud laialdast populaarsust, eriti Lõuna-Ameerika ja Aasia arengumaades.
6) Puidu ekskavaatoriga teisaldamise meetod (kühvliraie)
Sellist raieviisi kasutatakse peamiselt lõppraietel, kui käsitsi korjatud palke või piitsa on vaja liigutada korraga umbes 40-70 meetriste ridadena.  Ekskavaatorile on paigaldatud spetsiaalse disainiga käepidemega umbes 20 meetri pikkune nool. Efektiivsus põhineb sellel, et ekskavaatori pöörlemine on kiire ja seda on operaatoril lihtne juhtida. Seade võimaldab kogu puidu järk-järgult teele teisaldada või näiteks skidderi või forvarderiga edasiseks libisemiseks läbi raskete kohtade lohistada.
Ekskavaatorile on paigaldatud spetsiaalse disainiga käepidemega umbes 20 meetri pikkune nool. Efektiivsus põhineb sellel, et ekskavaatori pöörlemine on kiire ja seda on operaatoril lihtne juhtida. Seade võimaldab kogu puidu järk-järgult teele teisaldada või näiteks skidderi või forvarderiga edasiseks libisemiseks läbi raskete kohtade lohistada.
Joonis 5 Puidu teisaldamine ekskavaatoriga põhikasutusega tihedalt kasutatavatelt kruntidelt teede lähedalt annab väga kõrge tootlikkuse.
7) Käsitsi langetamine ja libisemine (kaabellibisemine)
Käsitsi korjatud piitsade otstesse kinnitatakse chokerid, millega vintsi ja peakaabli abil moodustatakse 3-10 vitsaga pakid, pakid veetakse teele.  2-liikmelises grupis saab tööjõu efektiivsuse tõstmiseks kasutada kahte drosserite komplekti. Teine õhuklapp jääb kinnitama õhuklappe, samal ajal kui traktorist veab eelmise paki tee poole. Hokeri teelt eemaldamine võtab üsna kaua aega ja traktorist peab tihti peatuma, et piitsad korralikult hunnikutesse sorteerida. Lõikamine toimub mesilas või tee ääres, piitsade lõikamine sortimentideks - tee ääres või ainult tehases. See koristamisviis on üsna levinud kogu maailmas.
2-liikmelises grupis saab tööjõu efektiivsuse tõstmiseks kasutada kahte drosserite komplekti. Teine õhuklapp jääb kinnitama õhuklappe, samal ajal kui traktorist veab eelmise paki tee poole. Hokeri teelt eemaldamine võtab üsna kaua aega ja traktorist peab tihti peatuma, et piitsad korralikult hunnikutesse sorteerida. Lõikamine toimub mesilas või tee ääres, piitsade lõikamine sortimentideks - tee ääres või ainult tehases. See koristamisviis on üsna levinud kogu maailmas.
Joonis 6 Traditsiooniline choker tross-juukur on endiselt enimkasutatav metsamasina tüüp. Drosselite ja kaabli abil monteeritakse pagasiruumid kimpudeks, mis veetakse teeäärsesse lattu.
8) Palkide käsitsi ülestöötamine ja äravedu loomade või buldooseriga
Arengumaades levinud saagikoristusmeetod, milles mootorsaed  nad lõikavad tüvedest maha vaid kõige väärtuslikumad osad ja libisevad veoloomade või buldooseri abil teele.
nad lõikavad tüvedest maha vaid kõige väärtuslikumad osad ja libisevad veoloomade või buldooseri abil teele.
Joonis 7 Elevante kasutatakse Aasias metsaraiel endiselt laialdaselt. Elevandi koolitus palkide vedamiseks kestab kuni 20 aastat.
Harvester on mitmeotstarbeline metsaraieseade, mis suudab üheaegselt teha mitut tootmistoimingut. Seda kasutatakse puude valik- või lageraiel langetamiseks, laasimiseks, laastamiseks ja sortimendi virnastamiseks.
Harvester on avara kabiini ja manipulaatoriga iseliikuv šassii, mille otsa on fikseeritud multifunktsionaalne pea. Poom lendab välja 10 m kaugusele, mis võimaldab töötada kuni 20 meetri laiustel maandumisaladel. Harvesterite kasutamine võimaldab loobuda suurest hulgast tehnikast ja töölistest, kuid samas tagada kiire, kvaliteetne ja ohutu raie.
Toimimispõhimõte
Vaatamata multitegumtööle on kombainid hõlpsasti kasutatavad. Nende töötsükli võib jagada järgmisteks peamisteks etappideks:
- operaator juhib harvesteri puudele võimalikult lähedale ja toob seejärel noolemanipulaatori abil seadme pea tüve lähedale;
- puu jäädvustatakse laasimisnugade ja harvesterirullidega, andurid aga määravad tüve paksuse;
- operaatori käsul puu raiutakse. Selleks on vaja 1-2 lõiget (olenevalt pagasiruumi paksusest);
- harvesteri tööplokk ühendatakse automaatselt puu küljest lahti ja pööratakse, mis hoiab ära selle kahjustumise langetatud tüve kukkumisel;
- langetatud puu liigutatakse rullidega edasi, samal ajal lõigatakse tüvest oksad ja oksad;
- Harvesteri andurid annavad signaali, kui puu vajalik jämedus on saavutatud. Selles piirkonnas lõigatakse pagasiruumi ära;
- ettevalmistatud materjalid virnastatakse korraga või partiidena (partiidena), misjärel laaditakse need spetsiaalsetele seadmetele ja transporditakse tehnoloogilisele objektile.
Harvesteri tööd juhib operaator kabiinist. Spetsiaalse juhtimissüsteemi abil liigutab ta harvesterit objektil ringi, määrab manipulaatori optimaalse kiiruse ja toimingute tempo.
Harvesteri juhtimine
Juhikabiin asub raamil ja näeb välja nagu traktorikabiin. See annab hea ülevaate, mis suurendab tööohutust. Harvesterit juhivad programmeeritavad kontrollerid. Igaüks neist vastutab konkreetse tehnoloogia mooduli eest: raam, mootor, kabiin, pea, manipulaator, automaatkäigukast. Kontrollereid juhitakse juhtkangidega, tööprotsessi jälgimiseks on kabiinis monitor.
Operaator paneb harvesteri arvutisse põhiparameetrid enne tööle asumist. Eelkõige tuleb sinna sisestada andmed puiduliigi, sortimendi vajalike läbimõõtude jms kohta (kokku mitusada parameetrit). Sisestatud info põhjal määrab harvesteri arvuti automaatselt elementide pikkuse, kuid lõpliku otsuse teeb operaator. Pärast masina programmeerimist reguleerib operaator juhtkangi kasutades pea pagasiruumi järgi, lülitab sisse saagimisrežiimi, seejärel - puidu töötlemine ja saagimine.
Vaatamata juhtkangiga manipuleerimise näilisele lihtsusele on tõhusaks ja kiireks tööks vajalik liigutuste kõrge koordinatsioon. Seetõttu võivad harvestereid juhtida vaid vastavatel kursustel koolitatud spetsialistid.
Kombainide tüübid
Kaasaegsetel kombainidel on peaaegu sama disain ja töösõlmede komplekt. Kuid need erinevad välimuse ja teatud parameetrite poolest. Praeguseks kasutavad juhtivad tootjad kombainide klassifikatsiooni järgmiste kriteeriumide järgi.
Töödeldud pagasiruumi kaalu ja läbimõõdu järgi:
- kerge - metsaalade harvendamiseks kasutatakse raieks väikesemõõdulisi harvestereid. Võimeline langetama puid läbimõõduga 5-40 cm;
- keskmised - universaalsed harvesterid, mida kasutatakse mitmesugusteks metsatöödeks, saavad suurepäraselt hakkama kuni 50 cm paksuste puude langetamisega;
- rasked - tootlikud harvesterid, mis on mõeldud suuremahulisteks metsaraietöödeks. Kergesti saagida puid läbimõõduga kuni 60 cm;
- üliraske – võimas ja ülitõhus varustus keerukaks tööks. Võimeline lõikama puutüvesid paksusega üle 1 meetri.
Veermiku tüübi järgi:
- ratastega harvester - sellel on võimas alus, mille rattavalem on 4 x 4, 6 x 6 või 8 x 8, mida täiendavad nelikvedu ja spetsiaalsed maastikurehvid;
- roomikharvester - sellel on jooksvad rattad ja roomikketid koos nende pingutusmehhanismidega, mida sageli täiendatakse lumekettidega.
Harvesteripea tüübi järgi:
- kombineeritud tüüp - neil on liigendnoom ja mugav teleskoopkäepide (kõige levinum variant);
- paralleelne tüüp - tõstepoom on valmistatud rööpküliku kujul ja täiendatud teleskoopkäepidemega.

Tehnilised andmed
Harvesteri efektiivsuse määravad ära selle algparameetrid. Valides sellise multifunktsionaalse harvesteri konkreetsete ülesannete ja töötingimuste jaoks, soovitame teil kõigepealt pöörata tähelepanu sellistele tehnilistele omadustele nagu:
- seadmete kaal ja mõõtmed. Need parameetrid valitakse, võttes arvesse tööpiirkonna omadusi. Kompaktsed ja kerged mudelid on paremini manööverdatavad, kuid künklikul maastikul vähem stabiilsed, ka tootlikkus ja kandevõime on tavaliselt rasketehnikaga võrreldes madalamad;
- šassii tüüp ja kliirens. Roomikkombainidel on suur ujuvus ja neid kasutatakse sageli ebatasasel ja soisel maastikul. Ratastega kombainid on paremini manööverdatavad. Kliirens mõjutab otseselt sõidukite läbilaskvust ja valitakse ka tööpiirkonna iseärasusi arvesse võttes;
- elektrijaama võimsus. Raskesti ligipääsetavate alade ülestöötamiseks ja/või suurte puude saagimiseks on vaja võimsama mootoriga harvestereid;
- manipulaatori tüüp. See sõlm vastutab koormate tõstmise ja teisaldamise eest. Kaasaegsed harvesterid on tavaliselt varustatud hüdrauliliste manipulaatoritega, kuna selle konstruktsiooni mehhanismid eristuvad töökindluse ja jõudluse poolest;
- ulatumis- ja pöördenurk. Mida kaugemale poom lendab, seda suurema ala suudab harvester katta. Sellest lähtuvalt tõuseb ka tehnoloogia tootlikkus. Märkimisväärne poomi ulatus ja suur pöördenurk suurendavad töö mugavust mägedes, küngastel, raskesti ligipääsetavates kohtades;
- tööorgani kandevõime. See valitakse, võttes arvesse harvesteri poolt langetatavate puude jämedust ja kaalu. Mida massiivsemad on tüved, seda suurem peaks olema kandevõime.
Harvesteri eelised
Võrreldes tavaliste metsatehnikaga on harvesteridel järgmised põhilised eelised:
- suur jõudlus. Olenevalt mudelist võib see olla 150-300 m 3 puitu vahetuses. Kombinatsioonis forvarderiga on harvester võimeline koristama üle 60 000 m 3 materjali aastas;
- saagikoristuse kvaliteet. Harvesterid tagavad kvaliteetse puude pikkuste kopeerimise, võimaldavad täpselt jälgida sortimentide pikkust ja läbimõõtu, mis suurendab metsaraie efektiivsust ja vähendab täiendavate töötlemistoimingute hulka;
- koristatud materjalide täpne arvestus. Samas on inimfaktor täielikult välistatud, mis aitab vältida juhuslikke või tahtlikke vigu. Täpne arvutus annab võimaluse sortimentide tõhusaks planeerimiseks läbimõõtude järgi, saadud mahtude esialgseks määramiseks;
- raieprotsesside automatiseerimine. See võimaldab jälgida seisaku- ja tööaega, kütusekulusid, määrata tootlikkust asukoha ja aja järgi ning annab muid kasulikke võimalusi analüüsiks;
- jäätmete vähendamine. Annab võimaluse raieprotsessist maksimumi võtta;
- võime töötada raskesti ligipääsetavates kohtades ja/või öösel. See suurendab veelgi metsaraie tootlikkust ja tõhusust;
- metsaraietööde ohutuse parandamine. Harvesterite kasutamisel puudub oht langetajale mootorsae või mahalangenud puu tõttu vigastada;
- töötingimuste parandamine. Operaator töötab mugavas, mugavas kabiinis, kus on ventilatsioon ja küte/jahutus, ilma putukateta ja minimaalses koguses tolmu. Seega väheneb raiujate kutsehaiguste risk;
- odav. See saavutatakse raieprotsessi tootlikkuse tõstmisega, personali arvu vähendamisega, säilitades või isegi suurendades puitmaterjalide tootmist.
Cat® kombainid
Tuntud Caterpillar, üks maailma juhtivaid eriseadmete tootjaid, loob eeskujuliku töökindluse ja tõhususega roomikkombainid. Seadmed on suurepäraselt kohandatud töötama rasketes tingimustes, ületavad kergesti ebatasast maastikku ning teostavad mitmesuguseid raie- ja puidutöötlemistoiminguid. Caterpillari harvesterid on varustatud multifunktsionaalse tööpea, mugava kabiini, ülitäpse IQAN juhtimissüsteemi, võimsate mootorite ja vastupidava veermikuga.
Populaarsed harvesterimudelid
Ameerika firma Caterpillar toodab röövikuid Cat 521B ja Cat 522B, mida peetakse metsatehnika seas vääriliselt vastupidavuse ja stabiilsuse standardiks. Määratud varustus on võimeline täitma kõige keerukamaid ülesandeid, näidates enesekindlat tööd isegi rasketes töötingimustes, näiteks ebatasasel maastikul. Kassikombainid on loodud ka mitmekülgsemaks, mugavamaks, võimsamaks ja kütusesäästlikumaks.

Neil on järgmised peamised omadused:
- mudelite koguvõimsus on 226 kW;
- noole maksimaalne ulatus - 9,9 m (koos peaga).
Peamine erinevus seisneb töökaalus. Mudelil Cat 521B on see 26,966 tonni, Cat 522B puhul on see 31,993 tonni (ilma peata).

Kassikombainide disaini eelised
- Usaldusväärne jõuülekanne. Harvesterid Cat 521B ja Cat 522B on varustatud patenteeritud Cat C9 ACERT mootoritega, mis vastavad Tier 3 nõuetele. Need ajamid tagavad suurepärase võimsuse, suure pöördemomendi ja suhteliselt madalad kütusekulud. Need on vastupidavad, erakordselt töökindlad, hõlpsasti hooldatavad ja Ameerika standarditele vastavad keskkonnasõbralikud.
- Multifunktsionaalne hüdraulika. Harvesterid on varustatud suletud keskusega hüdrosüsteemide ja elektrooniliste juhtseadmetega, mida saab programmeerida konkreetsete ülesannete ja töötingimuste jaoks. Hüdraulikasüsteemi kuuluvad ka eraldi pumbad saele, tööseadmetele, sõidu- ja juhtimisahelatele, mis suurendab tehnoloogiliste toimingute mugavust ja stabiilsust, seadistades soovitud seadistusi.
- Tasandussüsteemi olemasolu (kallutamine). See on ainus süsteem, mis kallutamisel tagab üheaegse liikumise kahes suunas kogu harvesteri käigu pikkuses. Cat nivelleerimissüsteem on varustatud kolme hüdrosilindriga ning on väga töökindel ja pikk kasutusiga.
- Mitmekülgne ja töökindel veermik. Masinad on varustatud uue alusvankriga, mille suurus on D7. See lahendus tagab metsaraie töökindluse, võimaldab töötada mitmel maastikul, sealhulgas kivistel nõlvadel, soistel madalikel.
- Mugav kabiin. See on loodud spetsiaalselt metsatehnika jaoks. Cat kombainide kabiin pakub valdkonna juhtivatele operaatoritele mugavust ja kaitset, mille tulemuseks on parem töökvaliteet. Uus ISO-kinnitussüsteem vähendab vibratsiooni ja akustilisi mõjusid. Juhtnupud on hästi läbimõeldud ja ergonoomiliselt paigutatud. Kabiinid on testitud 120% varustuse massist, vastavad OPS, ROPS, WCB jne standarditele.
- Vastupidavus. See on tingitud harvesterite töökindlast konstruktsioonist ja asjaolust, et nende tootmisel kasutatakse suurema tugevusega komponente ja osi, samuti kaitseelementide olemasolu. Näiteks roomikud on varustatud alusvankri kahjustamise vältimiseks. Seal on kaitseelemendid (võred, piirded) ja muud olulised komponendid, sh radiaator jne.
- Mugav juhtimine. Cat kombainides toimub see elektroonilise IQAN süsteemi kaudu. See võimaldab seadistada ja konfigureerida palju parameetreid, andmed kuvatakse suurel monitoril.
Enne kui puu töödeldakse, tuleb see maha võtta ja metsast välja viia. Üha enam kasutatakse selleks raskeks tööks "terasest" metsaraie: harvesterid ja forvarderid.
Tänapäeval tehakse pool maailma tööstuslikust metsaraietest käsitsi, teine pool mehhaniseeritakse kahel meetodil: puupikkuse raietehnoloogia osakaal on umbes 60% ja raiutud raie umbes 40%.
Lõiketehnika ja raiemasinate kasutamise prioriteet kuulub Skandinaavia maadele ning on praegu aktiivselt juurutamisel SRÜ riikides ja Lõuna-Ameerikas. Kaasaegse täismehhaniseeritud lõikustehnoloogia aluseks on harvesterid (manipulaator-tüüpi langetus-lõhkumis-tagamismasinad) ja forvarderid (iselaadimismasinad raiutud esemete transportimiseks). Muide, juba 1984. aastal lõi Karjala Metsatööstuse Uurimisinstituut NSVL-s esimese sortimentide lõikamiseks mõeldud masinate kompleksi, kuid sel ajal ei kasutanud tööstuse spetsialistid veel praegu populaarseid masinate nimetusi - "harvester". , "ekspediitor".
Metsakombain - harvester - ei ilmunud kohe. See arenes välja laasimismasinast, mis omandas algul vitsa tõukamise (lõikamise) funktsiooni ning hiljem “ristati” langetusmasinaga. Esimesed harvesterid töötlesid puud kahes etapis: esmalt püüti see kinni ja lõigati langetuspeaga maha, seejärel asetati see laasimise ja koputusseadmesse (protsessorisse). Lisaks pidi mõne mudeli puhul töötama kaks operaatorit: üks masina juhtimiseks, teine protsessor!
Tsükliaja lühendamiseks leiutati peaaegu 40 aastat tagasi üks agregaat – harvesteripea. See ühendab endas haardemehhanismi, lõikeseadet puu langetamiseks ja raiumiseks, laasimise mehhanismi (tõmberullikud ja laastusnoad) ja pikkuse mõõtmise mehhanismi.

Harvesteril ja forvarderi šassiil on palju ühist

Kompaktsed, manööverdatavad mudelid, mis sobivad ideaalselt metsade harvendamiseks

Lageraie jaoks on vaja võimsamat tehnikat
Toodetud mudelid jaotatakse töödeldava tüve läbimõõdu ja omakaalu järgi klassidesse: kerged (300-600 kg, Ø 5-40 cm), keskmised (700-1000 kg, Ø 5-50 cm) ja rasked ( 1000-1200 kg, Ø 10 -60 cm). Esimesi kasutatakse harvendusraieteks, teist universaalsed, viimaseid lõppraieteks. Turul on ka võimsamaid kuni 3500 kg kaaluvaid mudeleid, mis saavad hakkama ka üle meetri paksuste tüvedega! Harvesteripäid arendavad ja toodavad hetkel järgmised ettevõtted: AFM-Forest, Arbro-Stroke, Caterpillar, Kesla, Komatsu Forest (Valmet), Kone-Ketonen, Lako Forest, Log Max, Logset, Mense RPK, Naarva, Ponsse, Silvatec, SP Maskiner, Tigercat, Waratah jne.
Valdav enamus metsamasinatest on manipuleerivad, seega on võimalik inimest kaitsta otsese kokkupuute eest raskete ja traumeerivate puude, piitsade ja sortimentidega. Harvesteripea riputatakse läbi rotaatori hüdromanipulaatori "terasvarre" külge. Laialdaselt kasutatakse kombineeritud tüüpi (teleskoopkäepidemega liigendnoom) ja paralleelset tüüpi (teleskoopkäepidemega rööpkülikukujuline nool) manipulaatoreid. Harvesteritele on need saadaval kuni 12 m ulatusega ja koormusmomendiga 80 kuni 300 kNm. Manipulaatoreid toodavad ettevõtted: Cranab, John Deere, Kesla, Loglift, Ponsse, Rottne, Tigercat jne.
Forvarderite manipulaatorid eristuvad tagasihoidlikumate parameetritega: ulatus kuni 10 m, koormusmoment 40 kuni 160 kNm. Harvesteripea asemel on need varustatud haardega palkide laadimiseks. Forvarder töötab koos harvesteriga ja tarnib sortimentide toimetamiseks spetsiaalsetesse kohtadesse maanteetranspordile ümberlaadimiseks. Reeglina ei ületa transpordiõlg 1 km. Kõige võimsamate masinate kandevõime on 20 tonni! Forvarderi kaubaruumi moodustavad nari ja restiga esiseina, mõnel mudelil on võimalus seda ümber kujundada, et suurendada kergküttepuidu transpordimahtu.

Kahe vabadusastmega universaalliigend

Tasakaalukäru - lihtne ja funktsionaalne

Kaasaegne harvesteripea suudab palju
Harvesterite ja forvarderite töö toimub väga erinevates tingimustes, mida võib ühe sõnaga kirjeldada kui rasket, mis omakorda seab masinate projekteerimisele kõrgendatud nõuded. Funktsionaalselt on need erinevad, kuid struktuurilt on neil palju ühist.
Need on nelikveolised maastikusõidukid, mille rataste paigutus on 4x4, 6x6 või 8x8. Omamass jääb vahemikku 8-24 tonni.Paigutus on liigendraamiga kahemooduliline, energia (mootoriga) ja tehnoloogiliste (tööseadmetega) moodulite asukoha variatsioonid on väga mitmekesised, eriti kombainid. Mootoritena kasutatakse 4- ja 6-silindrilisi turboülelaaduriga diiselmootoreid võimsusega 130-280 hj. Pöördemomendi astmeteta reguleerimiseks ja edastamiseks kasutatakse mehhaanilis-hüdrostaatilist jõuülekannet, mis võimaldab realiseerida kuni 22-tonniseid veojõude ja kohaneda õrnalt lõikepiirkonnas tekkivate takistustega. Selle manuaalkäigukasti kaks vahemikku annavad tehnoloogiliseks kiiruseks 7-10 km/h ja transpordikiiruseks 25-34 km/h. Veotelgedel on planetaarrataste reduktorid, diferentsiaalilukud, mitme kettaga hüdraulilised pidurid.
Tasakaalustavad tandemvankrid ühendavad kolmeteljeliste masinate tagateljed, aga ka neljateljeliste masinate taga- ja esiteljed. Nende lihtne ja töökindel disain võimaldab edukalt ületada kännud, rahnud, kraavid. Muljetavaldav kliirens (580–800 mm) koos soomustatud põhjaga aitab samuti kaasa suurepärasele murdmaasõiduvõimele. Masinate erirõhu vähendamiseks maapinnal on rehvide laius lisaks suurele läbimõõdule 600 mm. Samuti on arsenalis libisemisvastased ketid ja roomikud.
Kõik tööorganite "kere liikumised" viiakse läbi hüdraulika abil. Hüdraulikasüsteemil on üks või mitu vooluringi, mida toidetakse muutuva koormuse tundlikkusega aksiaalkolbpumbadest. Töövedelik suunatakse elektrohüdraulilise juhtimisega proportsionaalsete hüdroventiilide abil manipulaatori hüdrosilindritesse ja hüdromootoritesse ning harvesteripeasse. Biolagunevate õlide kasutamine aitab kaasa metsa ökoloogilise olukorra säilimisele.
Tänu juhtsüsteemile, mis vastutab hüdraulika, diiselmootori ja jõuülekande koordineeritud töö eest, saab masin liikuda ka siis, kui kraana ja harvesteripea töötavad. Operaatori ülesanne on suunata pea puu poole ning edasist töötlemist juhib pardaarvuti, mis määrab, kuidas piitsa suurima kasuteguriga kasutada. Mitme puu seadistused võimaldavad operaatoril ühe nupuvajutusega lülituda okaspuudelt lehtpuudele. Juhtimissüsteem võimaldab raiutud puidu arvestust mahu ja sortimendi järgi. Nii et vahetuse lõpus pole tehtud tööde kohta üksikasjalikku aruannet keeruline hankida ja üksikud "gurmaanid" võivad selle kabiinist lahkumata isegi e-posti teel kontorisse saata!

Kabiini tasandussüsteem tagab mugava töötamise kallakutel

Ketid ja roomikud suurendavad veelgi ujuvust

Järelveetav ekspediitor - odav ja rõõmsameelne!
Noh, kaasaegse "puuraiuja" kabiin stimuleerib ainult kõrget tööviljakust. Töökoht on kujundatud kõiki ergonoomika nüansse ja operaatorite soove arvestades.
Ajalooks on saanud arvukad hoovad, lülitite asetajad ja ümmargused analoognäidikud. Need asendati mugavate multifunktsionaalsete juhtkangidega, millel on minimaalselt "kuumad" klahvid ja värvilised puuteekraanid. Suundumuses on pöördetasandussüsteemiga pöördkabiinide kasutamine, mis on eriti efektiivne kallakutel töötamisel. Kabiin võib asuda nii pöörleval seadmel koos manipulaatoriga kui ka eraldi, samal ajal kui see pöörleb sünkroonselt manipulaatori taga. Et pea viimastest edusaavutustest "ringi" ei läheks ja harvesteripea maad "kündma ei hakkaks", korraldatakse operaatoritele koolitust: esmalt simulaatoril, seejärel päris masinal.
Lõpetuseks loetleme peamised harvesteride ja forvarderite tootjad: Caterpillar, Gremo, HSM, John Deere, Komatsu Forest (Valmet), Logset, Ponsse, Rottne, Sampo, Silvatec, Sogedep, Tigercat, TimberPro, Amkodor, MTZ, CHETRA jne. .
Eespool käsitletud ratasharvesterid ja forvarderid on kõige laialdasemalt kasutatavad. Samuti on laialdaselt kasutusel ekskavaatorite roomikšassiil põhinevad raskekombainid ja ratastraktoritel põhinevad kerged harvesterid. On olemas alternatiivne võimalus - Harvarder, mis ühendab kahte tüüpi masinaid. Moodustatud on iseliikuvate mini- ja järelveetavate forvarderite klass. Katsetatakse robotiseeritud masinate süsteeme ja hübriidajam kogub hoogu. Ühesõnaga metsameeste pere täieneb ja areneb pidevalt!
Aja jooksul seisavad inimesed üha enam silmitsi tootmise ning selle erinevate valdkondade ja tööstusharude optimeerimise ja ratsionaliseerimise probleemiga. Nagu teate, on laiskus kõigi leiutiste ema; Noh, vaevalt saate sellele vastu vaielda.
Sama kehtib ka näiteks puidutöötlemisega töötades. Käsisaag on loomulikult asendamatu ja kasulik tööriist, kuid mitte suurtel aladel. Seetõttu hakati enam kui sajand tagasi mõtlema, kuidas oma elu lihtsamaks teha, kui on vaja kiiresti ala puidust või mädakändudest ja lisasõlmedest puhastada. Ja siis nad mõtlesid välja metsatehnika.
Metsatehnika jaguneb mitmeks põhitüübiks: forvarderid, palgiveokid ja harvesterid. Noh, laadurid, traktorid ja manipulaatorid on lisakomponendid, mis lihtsustavad veelgi eriseadmete tööd.
Mis on siis kombainid?
Harvesterid on universaalne, multifunktsionaalne masin, mida kasutatakse raietöödeks ja erinevat tüüpi sortimendi ettevalmistamiseks raieplatsil.
Need on iseliikuvad sõidukid, millel on oma klassifikatsioon. Praegu on levinumad kaubamärgid John Deere, Volvo harvesterid, Ponsse harvesterid, Valmeti harvesterid, Timberjack jt.
 Nende põhiülesanneteks on: puude langetamine, üleliigsete okste saagimine ja trimmerdamine, metsa raiumine, aga ka valmis sortimendi mõõtmine.
Nende põhiülesanneteks on: puude langetamine, üleliigsete okste saagimine ja trimmerdamine, metsa raiumine, aga ka valmis sortimendi mõõtmine.
Need on sellised masinad, mille peamiseks tööelemendiks on spetsiaalne harvesteripea, mis tegelikult toodab metsa raiet.
Harvesteripea koosneb metallraamist, mida juhivad spetsiaalsed haardehoovad. Ja haardehoobade otstes on spetsiaalsed mootorid, mis puutüvele lähenedes alustavad otsest metsa langetamise protsessi.
Harvesteripea töö võib piirduda ühe või kahe lõikega. Kui puutüvi pole liiga suur, siis piisab tüve läbilõikamiseks ühest pidevast lõikest ja kui vastupidi, tüve läbimõõt on harvesteri tera jaoks liiga suur, siis tuleb kõigepealt teha lõige. ühel küljel, misjärel peaks harvester ümber pöörama ja alustatu lõpule viima, puu lõppraiega.
 Töö harvesteri kallal koosneb operaatori toimingutest, mis seisnevad metsa esmases ja teiseses töötlemises. Alustuseks on vaja, et manipulaator langeks puu, mille järel tuleb see viia spetsiaalsesse tehnoloogilisesse koridori; see toiming toimub lohistamisseadme abil, mis lohistab puutüve ettepoole ja lõikab spetsiaalsete kääridega maha kõik puu lisaeendid.
Töö harvesteri kallal koosneb operaatori toimingutest, mis seisnevad metsa esmases ja teiseses töötlemises. Alustuseks on vaja, et manipulaator langeks puu, mille järel tuleb see viia spetsiaalsesse tehnoloogilisesse koridori; see toiming toimub lohistamisseadme abil, mis lohistab puutüve ettepoole ja lõikab spetsiaalsete kääridega maha kõik puu lisaeendid.
Miks inimesed erivarustust ümber varustavad? Vastus sellele küsimusele peitub kulude kokkuhoius. Ilmselgelt, kui kasutate täisväärtuslikku kaubamärgiga harvesterit, tasub selle maksumus pika aja pärast ära; palju tulusam on mõni spetsiaalne pinnase- või pinnasmasin ümber ehitada harvesteriks.
Ekskavaatoril põhinev harvester
Kui klient vajab kõrge tootlikkusega harvesterit, mis suudab töötada ka kõige ebasoodsamates tingimustes, siis vääriliseks alternatiiviks täisväärtusliku Soome harvesteri ostmisele on ekskavaatori ümberehitamine harvesteriks.
Harvesteri peamiseks konstruktsioonielemendiks saab ekskavaatori alus, mis tuleb varustada vajalike komponentidega, nimelt: ekskavaatori kopa asendamine harvesteripeaga, hoobade ja juhtimissüsteemi enda paigaldamine, samuti kontrollmõõteseadme paigaldamine. süsteem, mis täidab oma kohustusi ja funktsioone kvaliteetselt.
Ekskavaatori ümbervarustuse protsessi määrab ennekõike kliendi soov säästa üsna palju raha. Loomulikult on see protsess üsna töömahukas, kuid kasu, mida klient lõpuks saab, on üsna käegakatsutav.